پاورپوینت مکانیزم ربات ها



چکیده محتوای فایل
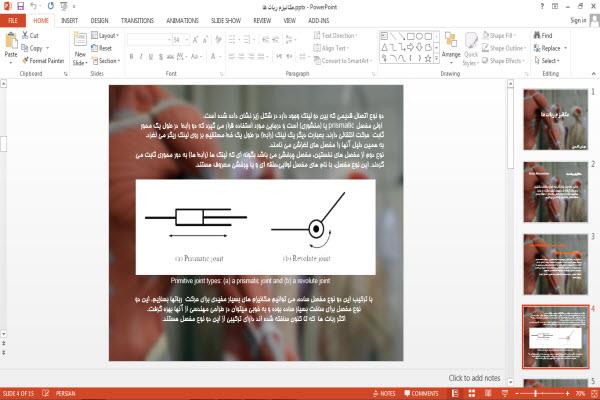
مكانيزم يك ربات شامل سيستم بدنه چند قسمتي و متعدد است كه به يكديگر متصل گرديده اند. ما در شروع، هر قسمت از بدنه را صلب در نظر گرفته و از الاستيسيته و تغيير شكل در اثر بارها چشم پوشي مي كنيم. هر جسم صلبي كه در مكانيزم رباط بكار مي رود لينك يا رابط ناميده مي شود و مجموعه يا تركيب لينك ها را بصورت اتصالات مي شناسيم. مسئله اساسي در مورد لينك ها چگونگي جفت شدن و اتصال آنها با يكديگر است...
فهرست
مكانيزم ربات ها
مفصل هاي نخستين و زنجيره اتصالات
سيستم هاي مختصات در مكانيزم ربات ها
لينك هاي موازي
آخرین فایل های ثبت شده در سیستم
|
پاورپوینت مکانیسم های نفوذ اتمی
رایگان |
|
پاورپوینت محیط های چند رسانه ای
رایگان |
|
پاورپوینت مباحث روشنایی معابر
رایگان |

|
پاورپوینت مباحث اولیه برق
رایگان |
|
پاورپوینت احیا اکسید های آهن
رایگان |

|
پاورپوینت کاربرد فیزیک در پزشکی
رایگان |
|
پاورپوینت نظریه سی. پی. اچ (CPH)
رایگان |

|
پاورپوینت مخترع تلسکوپ نجومی
رایگان |
|
پاورپوینت انجماد مواد غذایی
رایگان |
|
پاورپوینت فیزیک پایه 2
رایگان |
|
پاورپوینت ترمودینامیک
رایگان |
منتشر شده در تاریخ:
1396/03/03
بازدید شده توسط
1567
نفر
تعداد دانلود این فایل :
59
مرتبه
در صورت بروز خطا هنگام دانلود به بخش (پنل کاربری - خریدهای من) مراجعه فرمایید.
دیدگاه کاربران

مدیریت
- لطفا نظرات خود را با ما در میان بگذارید